前回の投稿「コルーチンでジョブを開始する」で、 co_await を適用しました 仕事を始める。この投稿では、ワークフローを改善し、必要に応じてジョブを自動的に再開します。最後のステップとして、別のスレッドでジョブを再開します。
これは、新しいキーワード co_return、co_yield、および co_await に関するミニ シリーズの 7 回目の投稿です。このコルーチンの実践的な紹介を理解するには、以前の投稿をすべて知っておく必要があります:
co_return :
- コルーチンを使用したシンプルな Future の実装
- コルーチンを使用した遅延フューチャー
- コルーチンを使用して別のスレッドで Future を実行する
co_yield:
- コルーチンによる無限のデータ ストリーム
- コルーチンを使用した汎用データ ストリーム
co_await:
- コルーチンでジョブを開始する
Awaiter の自動再開
前のワークフロー (「コルーチンを使用してジョブを開始する」を参照) で、awaiter ワークフローを詳細に示し、ジョブを明示的に開始しました。
int main() {
std::cout << "Before job" << '\n';
auto job = prepareJob();
job.start();
std::cout << "After job" << '\n';
}
この明示的な job.start() の呼び出し await_ready のために必要でした Awaitable MySuspendAlways で 常に false を返しました .ここで、await_ready が true を返すことができると仮定しましょう または false ジョブは明示的に開始されません。簡単なリマインダー:await_ready の場合 true を返します 、関数 await_resume 直接呼び出されますが、await_suspend ではありません .
// startJobWithAutomaticResumption.cpp
#include <coroutine>
#include <functional>
#include <iostream>
#include <random>
std::random_device seed;
auto gen = std::bind_front(std::uniform_int_distribution<>(0,1), // (1)
std::default_random_engine(seed()));
struct MySuspendAlways { // (3)
bool await_ready() const noexcept {
std::cout << " MySuspendAlways::await_ready" << '\n';
return gen();
}
bool await_suspend(std::coroutine_handle<> handle) const noexcept { // (5)
std::cout << " MySuspendAlways::await_suspend" << '\n';
handle.resume(); // (6)
return true;
}
void await_resume() const noexcept { // (4)
std::cout << " MySuspendAlways::await_resume" << '\n';
}
};
struct Job {
struct promise_type;
using handle_type = std::coroutine_handle<promise_type>;
handle_type coro;
Job(handle_type h): coro(h){}
~Job() {
if ( coro ) coro.destroy();
}
struct promise_type {
auto get_return_object() {
return Job{handle_type::from_promise(*this)};
}
MySuspendAlways initial_suspend() { // (2)
std::cout << " Job prepared" << '\n';
return {};
}
std::suspend_always final_suspend() noexcept {
std::cout << " Job finished" << '\n';
return {};
}
void return_void() {}
void unhandled_exception() {}
};
};
Job performJob() {
co_await std::suspend_never();
}
int main() {
std::cout << "Before jobs" << '\n';
performJob();
performJob();
performJob();
performJob();
std::cout << "After jobs" << '\n';
}
まず、コルーチンは performJob と呼ばれるようになりました 自動的に実行されます。 gen (行 1) は、数値 0 または 1 の乱数ジェネレーターです。シードで初期化されたデフォルトのランダム エンジンをジョブに使用します。 std::bind_front に感謝 、 std::uniform_int_distribution と一緒にバインドできます これを使用すると、乱数 0 または 1 が返されます。
callable は、関数のように振る舞うものです。これらの名前付き関数だけでなく、関数オブジェクトまたはラムダ式も含まれます。新しい関数 std::bind_frontについて詳しく読む 投稿「C++20 のますます多くのユーティリティ」で。
この例では、awaitable MySuspendAlways を除いて、C++ 標準から定義済みの Awaitables を持つ awaitables を削除しました。 メンバー関数 initial_suspend の戻り値の型として (2行目)。 await_ready (3 行目) ブール値を返します。ブール値が true の場合 、制御フローはメンバー関数 await_resume に直接ジャンプします (4 行目)、false の場合 、コルーチンはすぐに中断されるため、関数 await_suspend 実行します (5 行目)。関数 await_suspend コルーチンへのハンドルを取得し、それを使用してコルーチンを再開します (6 行目)。値 true を返す代わりに 、await_suspend は void を返すこともあります .
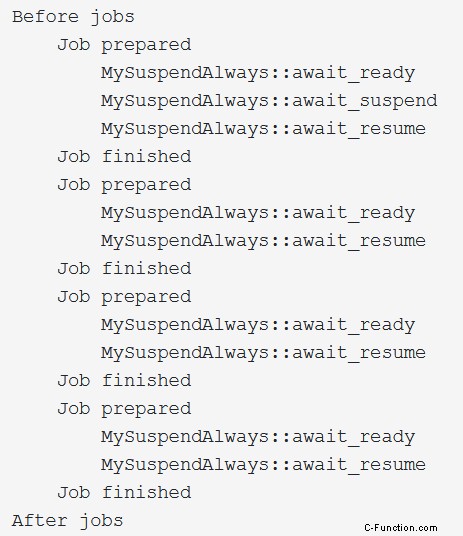
次のスクリーンショットは次のとおりです。 await_ready の場合 true を返します 、関数 await_resume await_ready の場合に呼び出されます false を返します 、関数 await_suspend とも呼ばれます。
 ここで最後のステップを行い、別のスレッドで awaiter を自動的に再開します。
ここで最後のステップを行い、別のスレッドで awaiter を自動的に再開します。 別のスレッドで Awaiter を自動的に再開する
次のプログラムは、前のプログラムに基づいています。
// startJobWithAutomaticResumptionOnThread.cpp
#include <coroutine>
#include <functional>
#include <iostream>
#include <random>
#include <thread>
#include <vector>
std::random_device seed;
auto gen = std::bind_front(std::uniform_int_distribution<>(0,1),
std::default_random_engine(seed()));
struct MyAwaitable {
std::jthread& outerThread;
bool await_ready() const noexcept {
auto res = gen();
if (res) std::cout << " (executed)" << '\n';
else std::cout << " (suspended)" << '\n';
return res; // (6)
}
void await_suspend(std::coroutine_handle<> h) { // (7)
outerThread = std::jthread([h] { h.resume(); }); // (8)
}
void await_resume() {}
};
struct Job{
static inline int JobCounter{1};
Job() {
++JobCounter;
}
struct promise_type {
int JobNumber{JobCounter};
Job get_return_object() { return {}; }
std::suspend_never initial_suspend() { // (2)
std::cout << " Job " << JobNumber << " prepared on thread "
<< std::this_thread::get_id();
return {};
}
std::suspend_never final_suspend() noexcept { // (3)
std::cout << " Job " << JobNumber << " finished on thread "
<< std::this_thread::get_id() << '\n';
return {};
}
void return_void() {}
void unhandled_exception() { }
};
};
Job performJob(std::jthread& out) {
co_await MyAwaitable{out}; // (1)
}
int main() {
std::vector<std::jthread> threads(8); // (4)
for (auto& thr: threads) performJob(thr); // (5)
}
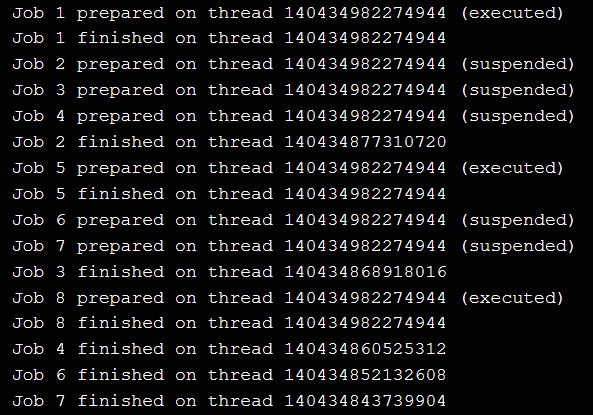
以前のプログラムとの主な違いは、新しい awaitable MyAwaitable です。 、コルーチン performJob で使用 (ライン1)。逆に、コルーチン performJob から返されたコルーチン オブジェクト 簡単です。基本的に、そのメンバー関数 initial_suspend (2 行目) と final_suspend (3 行目) 定義済みの awaitable std::suspend_never. を返します さらに、両方の関数で JobNumber が表示されます 実行されたジョブとそれが実行されるスレッド ID の。スクリーンショットは、すぐに実行されるコルーチンと中断されているコルーチンを示しています。スレッド ID のおかげで、中断されたコルーチンが別のスレッドで再開されたことを確認できます。
 プログラムの興味深い制御フローについて説明します。 4 行目は、デフォルトで構築された 8 つのスレッドを作成します。これは、コルーチン
プログラムの興味深い制御フローについて説明します。 4 行目は、デフォルトで構築された 8 つのスレッドを作成します。これは、コルーチン performJob (5 行目) 参照によって取得します。さらに、参照は MyAwaitable{out} を作成するための引数になります。 (ライン1)。 res の値に応じて (6 行目)、したがって、関数 await_read の戻り値 y、Awaitable は継続します (res true です ) 実行中または中断中 (res false です )。 MyAwaitableの場合 中断され、関数 await_suspend (7行目)が実行されます。 outerThread の割り当てのおかげで (8行目)、実行中のスレッドになります。実行中のスレッドは、コルーチンの存続期間を超えて存続する必要があります。このため、スレッドには main のスコープがあります。 関数。 次は?
完了:私は C++20 についてほぼ 100 の記事を書きました。次の投稿では、C++20 についていくつかの結論を述べ、C++ に関する「次は何ですか」という質問に答えたいと思います。